
产品描述
型号参数
资料下载
产品描述
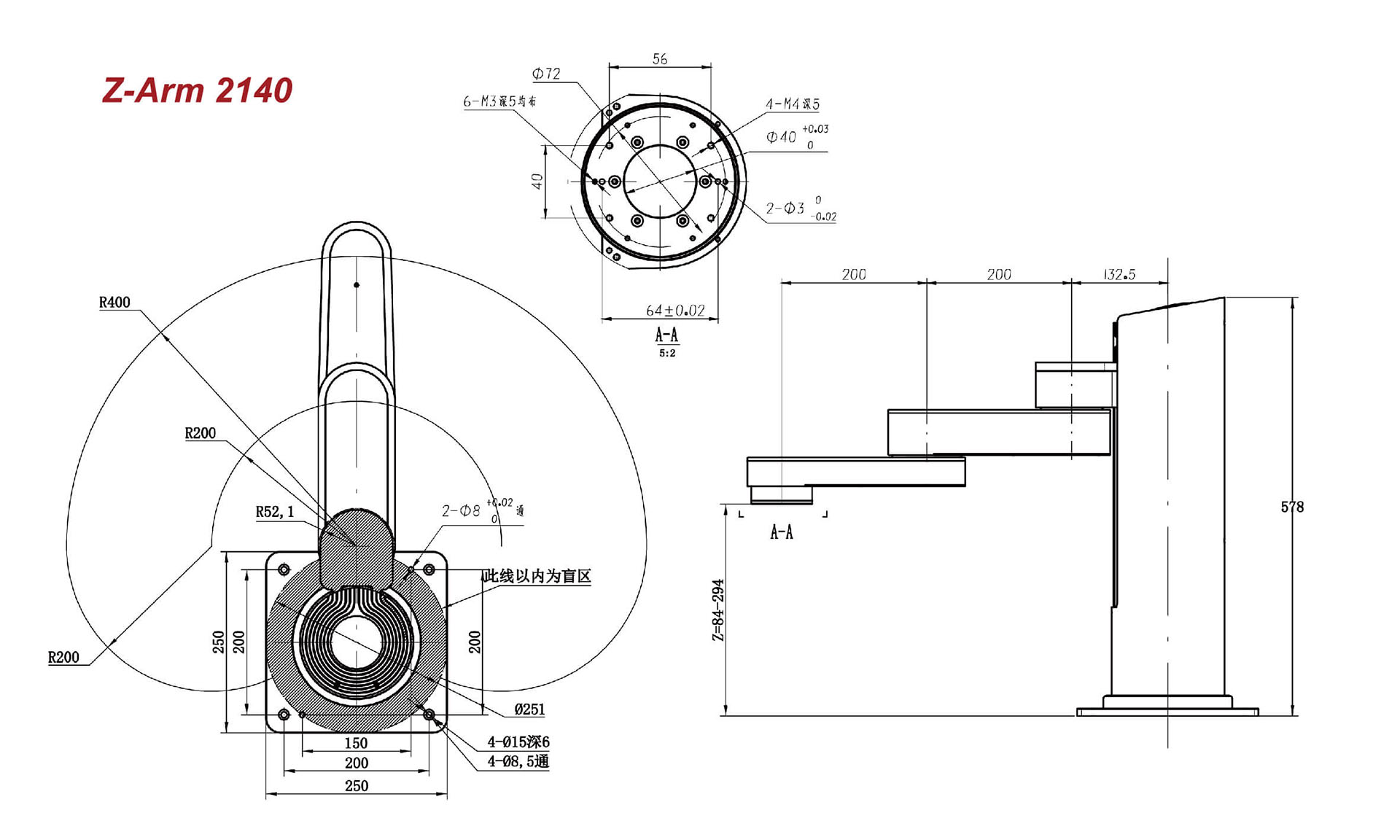
Z-Arm 2410 核心参数
| ±0.03mm | 3Kg |
| 重复定位精度 | 最大负载 |
| 400mm | 210mm |
| 臂长(1轴 + 2 轴) | Z 轴行程 |
| *范围尺寸图 |
 |
产品亮点
增强的负载能力
与之前的产品相比,Z-Arm 2140的有效负载能力提高了2倍,达到3KG。它将是物料搬运和装配任务的最佳竞助力。
安全稳定
作为台式协作机器人,Hitbot Z-Arm 2140在通过碰撞检测确保安全性以及通过以1255.45mm / s(1.5KG有效载荷)的快速移动和±0.03mm的可靠重复性来提高生产率。
智能编程
Hitbot Z-Arm 2140主要可以通过两种方法轻松设置。用户可以使用自行开发的一站式应用程序HitbotStudio,也可以手动拖放协作机器人本身来实现机器教学。两者仅需约20分钟。
开源硬件
Hitbot Z-Arm 2140是一种开源硬件协作机器人,可以由客户自己根据特定要求进行定制。支持的编程语言包括V-rep,Ros,Matlab,Java,Paython等。
各种可选套件
借助各种可选的最终工具套件,例如电动夹具,第五轴套件和Wi-Fi模块,用户可以在工作台上创建无限的未来生产应用场景。
灵活的应用
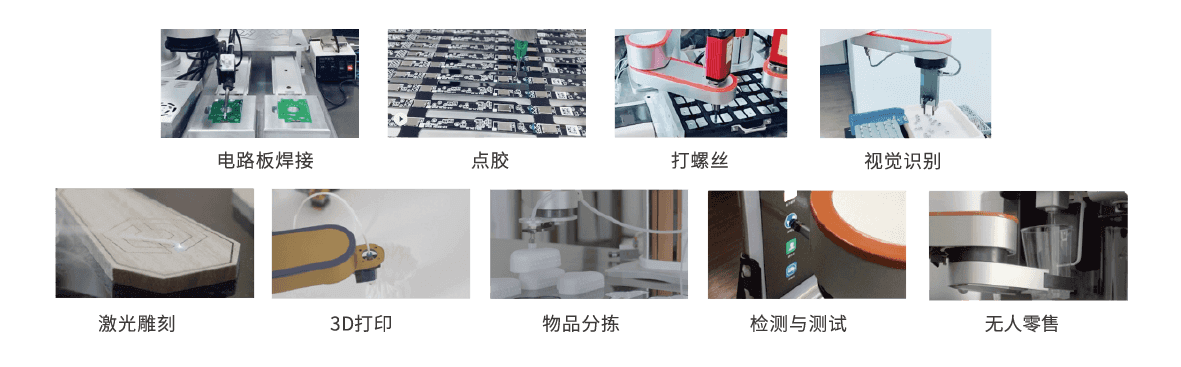
Z-Arm 2140是电子,食品和饮料,机械,太阳能,制药,医疗和研究领域等众多行业的理想选择。
接口面板使用功能
A处底座接口示意图
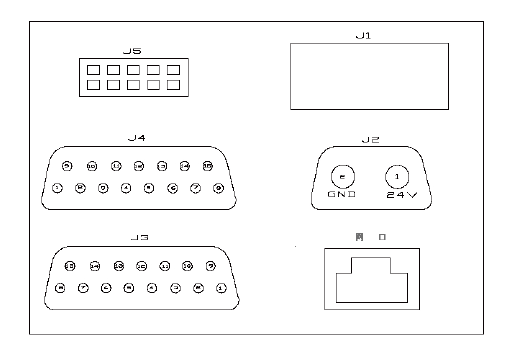
图1
图1接口定义说明
① J1为电源开关接口,用于控制电源通断。
② J2为电源输入口,24V直流电压源输入。
③ J3为IO输出口,内部9组光耦隔离NPN输出。
④ J4为用户IO输入口,内部9组光耦隔离输入。
⑤ J5为WIFI扩展口,配合本公司开发的WIFI模块用于手臂IP地址。
B处IO接口面板总示意图
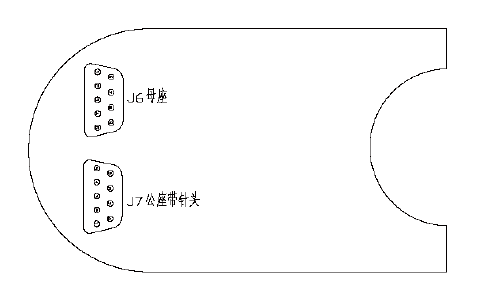
图2
图2接口定义说明
⑥ J6为IO输入输出口,机械臂末端提供给用户简单IO控制
⑦ J7为控制电动夹爪接口,机械臂末端提供给用户控制电动夹爪、3D打印、第五轴套件。
应用场景
型号参数
| 产品型号 | Z-Arm 2140 | |
| 编程软件 | HitbotStudio | |
| 轴数 | 4 | |
| 额定负载 | 2KG | |
| 最大负载 | 3KG | |
| 最大臂展 | 400mm | |
| 一轴臂展 | 200mm | |
| 二轴臂展 | 200mm | |
| 一轴旋转范围 | ±90° | |
| 二轴旋转范围 | ±164° | |
| Z轴行程 | 210mm | |
| 重复定位精度 | ±0.03mm | |
| 连接方式 | Wi-Fi/Ethernet | |
| I/O接口 | 数字量输入(隔离):5 | 数字量输出(隔离):5 |
| 碰撞检测 | 支持 | |
| 拖动示教 | 支持 | |
资料下载

