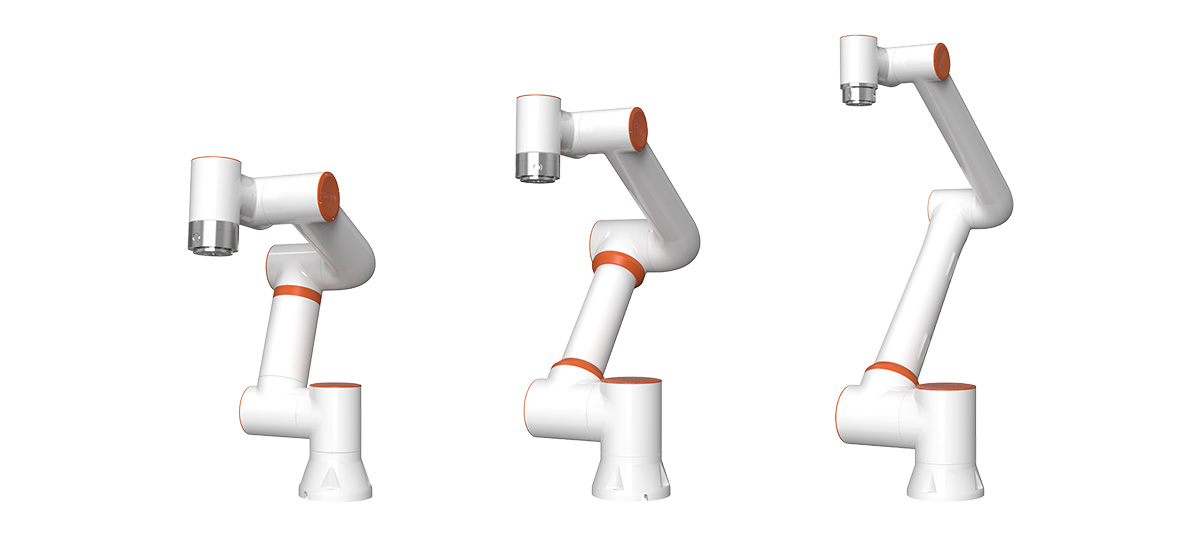
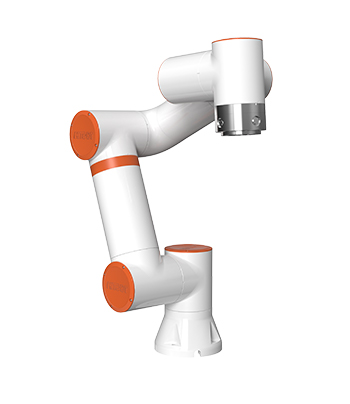
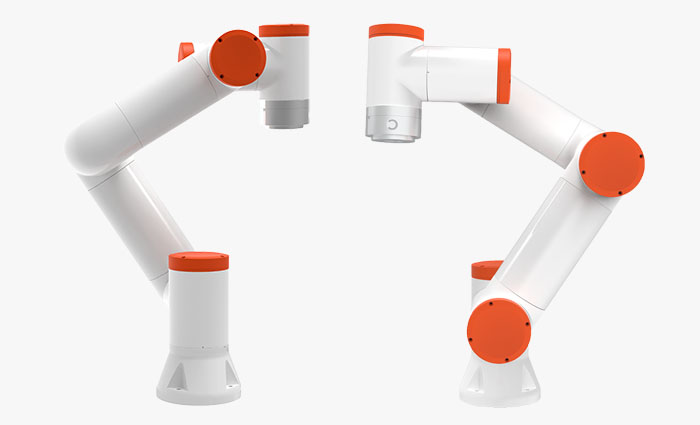
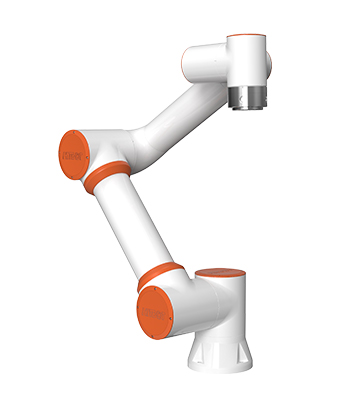
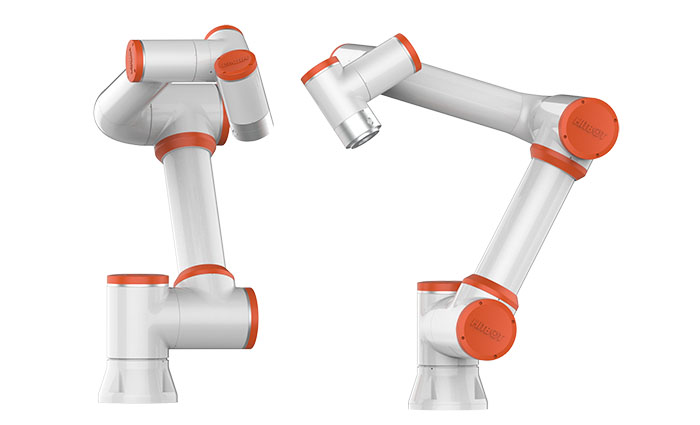
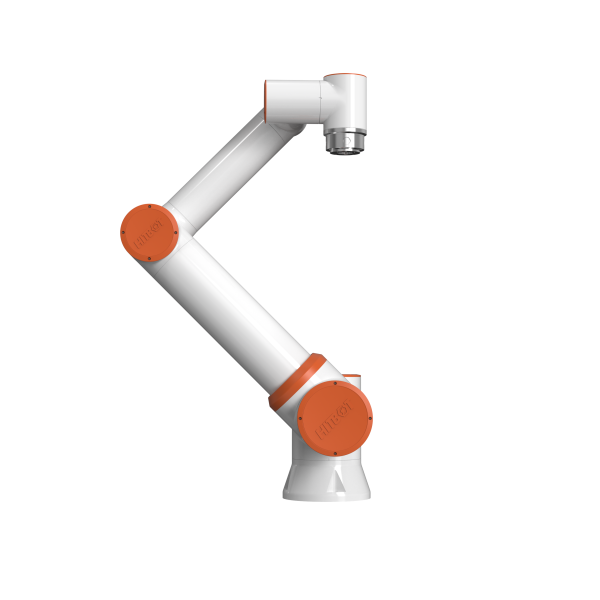
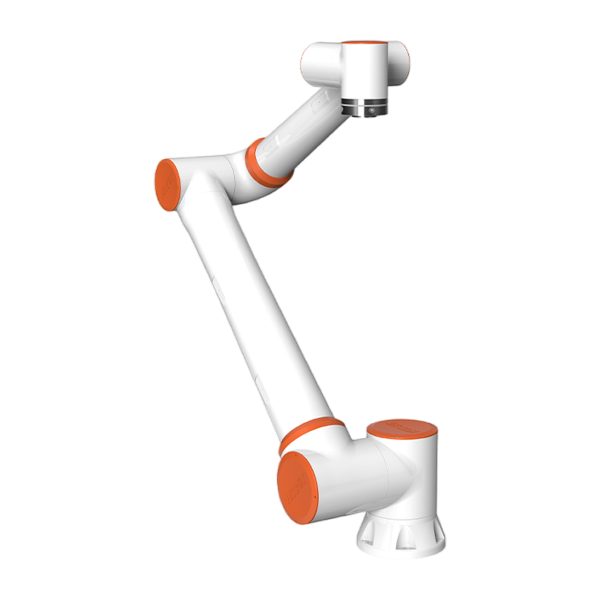
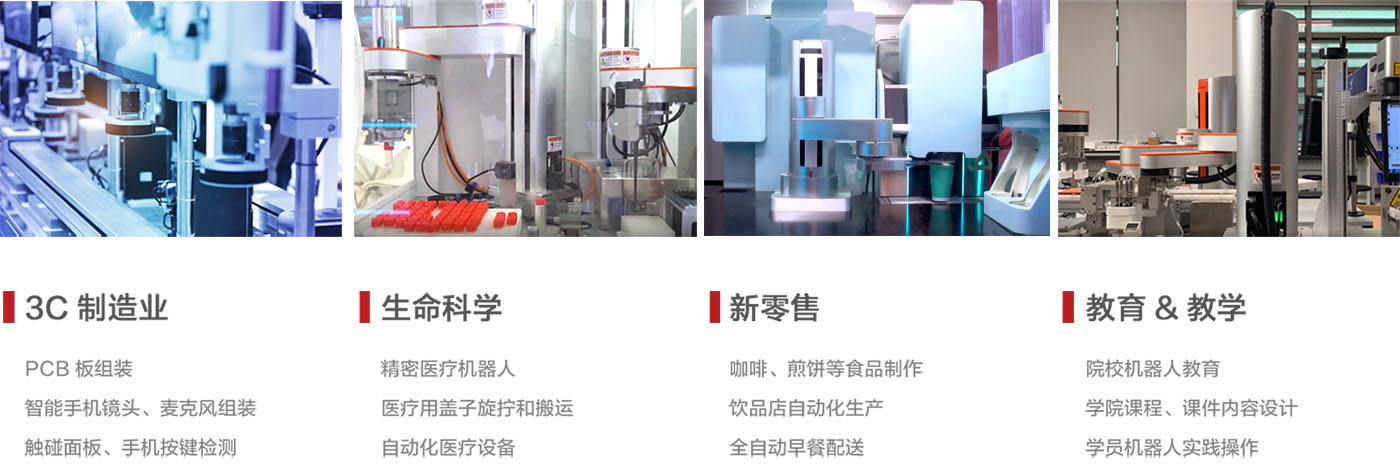
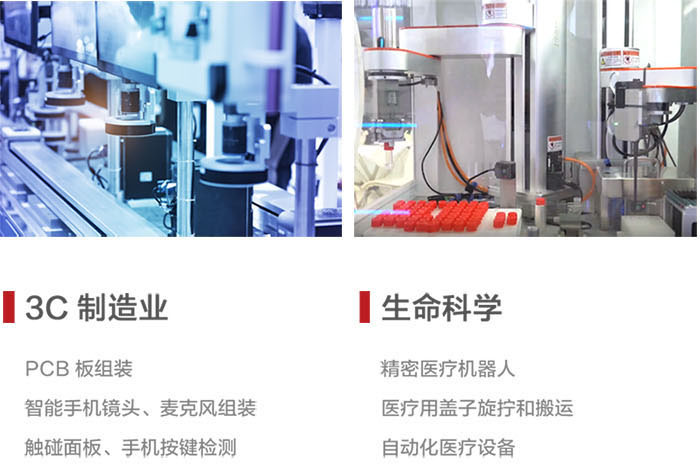
六轴协作机械臂 六轴协作机械臂 拥有拖动示教与图形化编程,有效降低应用门槛;高度集成减速机,电机及编码器,驱控一体;广泛应用于电子、医疗、汽车、食品等领域。 拥有拖动示教与图形化编程,有效降低应用门槛;高度集成减速机,电机及编码器,驱控一体;广泛应用于电子、医疗、汽车、食品等领域。 产品中心 Z-Arm S622协作型 工作半径: 622mm,重复定位精度:±0.02mm,有效负载: 3KG,机器重量约: 15KG支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯具有碰撞检测功能,允许自定义碰撞等级 查看详情 点击观看视频 手册下载 Z-Arm S622协作型 工作半径: 622mm, 重复定位精度:±0.02mm, 有效负载: 3KG,机器重量约: 15KG 支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯 具有碰撞检测功能,允许自定义碰撞等级 查看详情 Z-Arm S922协作型 工作半径: 922mm, 重复定位精度±0.02mm 有效负载: 5KG,机器重量约: 22kg 支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯 具有碰撞检测功能,允许自定义碰撞等级 查看详情 点击观看视频 手册下载 Z-Arm S922协作型 工作半径: 922mm, 重复定位精度±0.02mm 有效负载: 5KG,机器重量约: 22kg 支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯 具有碰撞检测功能,允许自定义碰撞等级 查看详情 Z-Arm S1034协作型 工作半径: 1034mm,重复定位精度: ±0.03mm负载: 16kg,机器重量约: 40KG支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯具有碰撞检测功能,允许自定义碰撞等级 查看详情 点击观看视频 手册下载 Z-Arm S1034协作型 工作半径: 1034mm, 重复定位精度: ±0.03mm 负载: 16kg,机器重量约: 40KG 支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯 具有碰撞检测功能,允许自定义碰撞等级 查看详情 Z-Arm S1400 协作型 工作半径: 1400mm, 重复定位精度: ±0.05mm 有效负载: 10KG,机器重量约:40kg 支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯 具有碰撞检测功能,允许自定义碰撞等级 查看详情 点击观看视频 手册下载 Z-Arm S1400 协作型 工作半径: 1400mm, 重复定位精度: ±0.05mm 有效负载: 10KG,机器重量约:40kg 支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯 具有碰撞检测功能,允许自定义碰撞等级 查看详情 Z-Arm S1854协作型 工作半径: 1854mm, 重复定位精度: ±0.1mm 负载: 20kg,机器重量约: 85KG 支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯 具有碰撞检测功能,允许自定义碰撞等级 查看详情 点击观看视频 手册下载 Z-Arm S1854协作型 工作半径: 1854mm, 重复定位精度: ±0.1mm 负载: 20kg,机器重量约: 85KG 支持I/O、TCP/IP、Modbus_TCP/RTU、Proflnet通讯 具有碰撞检测功能,允许自定义碰撞等级 查看详情 产品应用视频 播放视频 播放视频 播放视频 播放视频 更多案例视频 适合领域