产品描述
资料下载
产品描述
Z-Arm 4160 核心参数
| ±0.05mm | 3.5Kg |
| 重复定位精度 | 最大负载 |
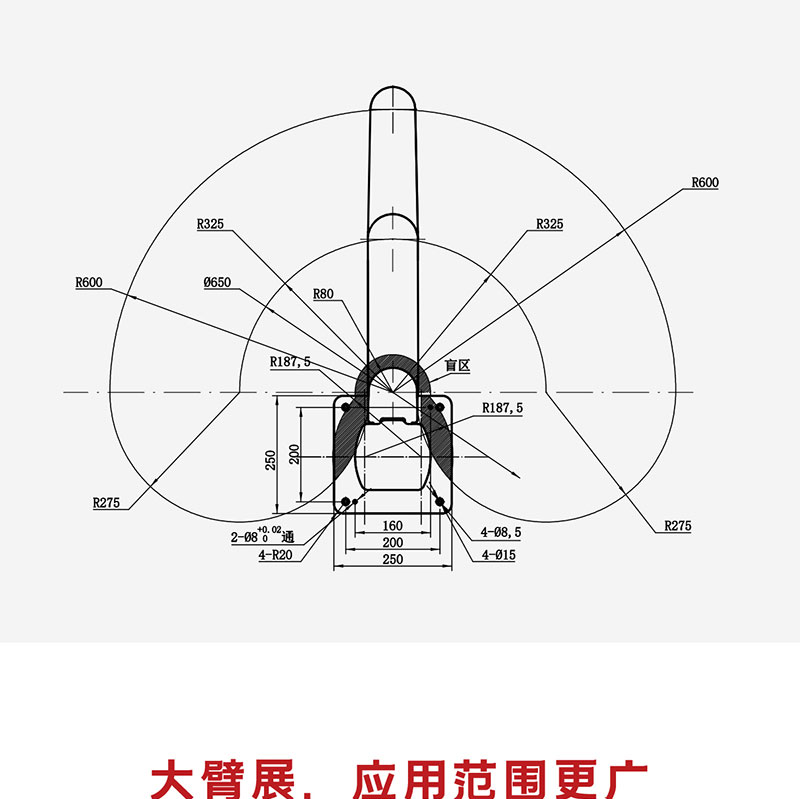
| 325mm | 275mm |
| 臂长(1轴 ) | 臂长(2轴) |
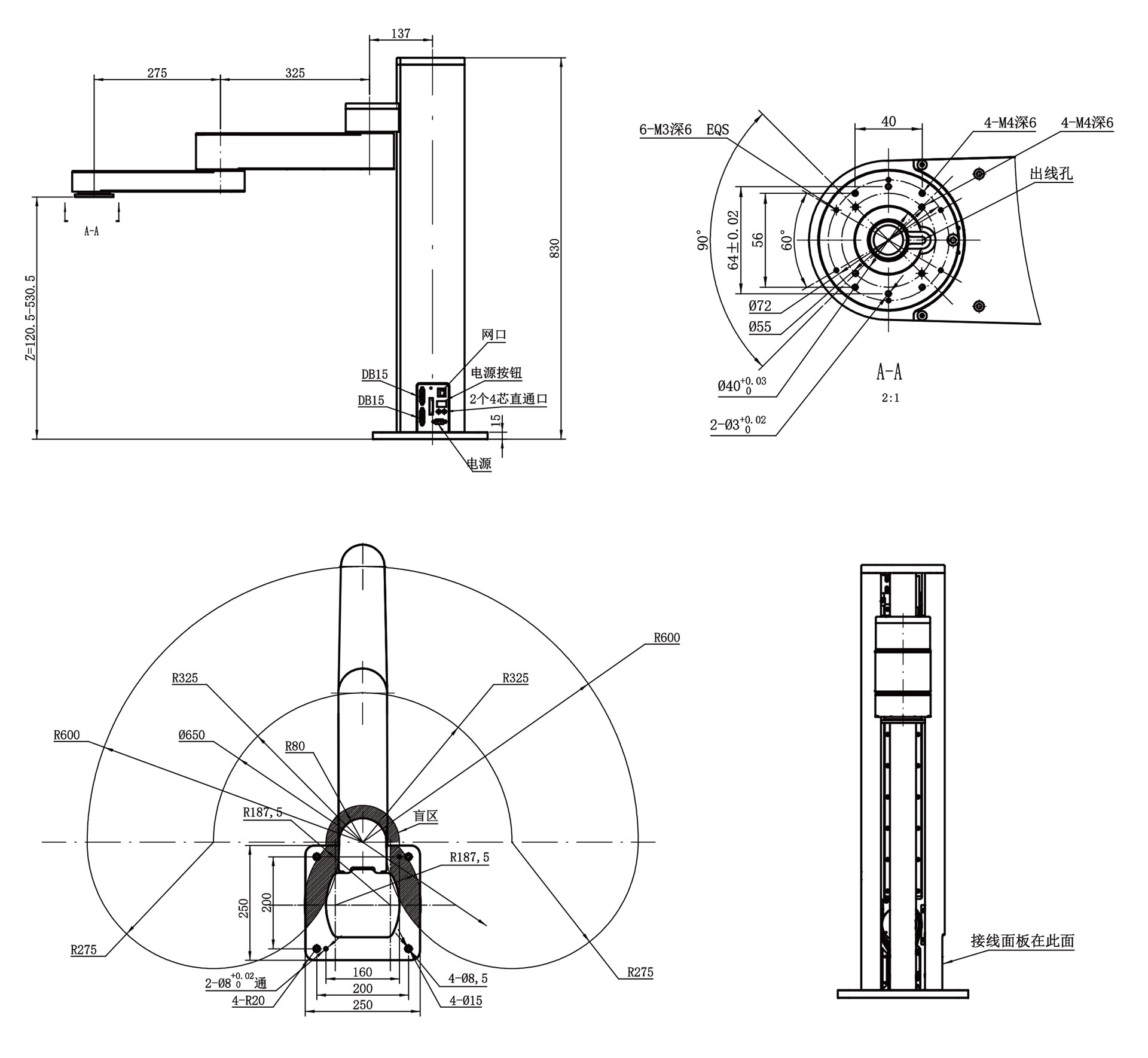
| *范围尺寸图 |
 |
规格参数
| 详情 |
| 1轴臂长 | 325mm |
| 1轴旋转角度 | ±90° |
| 2轴臂长 | 275mm |
| 2轴旋转角度/td> | ±164°(选配:15°~345°) |
| Z轴行程 | 410(高度可定制) |
| R轴旋转范围 | ±1080°无机械限位 / ±170°有机械限位 |
| 线速度 | 1500mm/s(负载3kg) |
| 重复定位精度 | ±0.05mm |
| 标准负载 | 3kg |
| 最大负载 | 3.5kg |
| 自由度 | 4 |
| 电源 | 额定功率:1000W;输入电压110-220V(50-60HZ); 输出电压:DC 48V |
| 通讯 | Ethernet |
| Z轴可以定制高度 | 0.1m~1m |
| 电器预留接口 | 标配:插座面板直通小臂下盖板2根4*23awg(无屏蔽层)线 可选配:插座面板直通法兰2根φ4气管 |
| 使用环境型 | 温度:0~45℃ 湿度:20~80%RH(不结霜) |
| I/O口 数字量输入(隔离) | 9+3+小臂扩展(8进8出;夹爪专用端口:脉冲或485) |
| I/O口 数字量输出(隔离) | 9+3+小臂扩展(8进8出;夹爪专用端口:脉冲或485) |
| I/O口 模拟量输入(4-20mA) | / |
| I/O口 模拟量输出(4-20mA) | / |
| 整机高度 | 830mm |
| 主机重量 | 410mm行程裸机重量约28.5kg |
| 底座外形尺寸 | 250*250*15mm |
| 底座固定孔位间距 | 200*200mm配四个M8*20螺丝 |
| 碰撞检测 | / |
| 拖动示教 | √ |
| 硬急停 | √ |
| 调试/在线升级(USB口) | √ |
| 出线规格 | AC线&DC线:2米、不能走拖链 |
| 节拍时间 | 2.112s |
备注:由于产品不断推新迭代,产品参数如有变更,恕不另行通知。
资料下载