产品描述
资料下载
产品描述
Z-Arm S1034 核心参数
| ±0.03mm | 16Kg |
| 重复定位精度 | 有效负载 |
| 1034mm | 1m/s |
| 工作半径 | 典型TCP速度 |
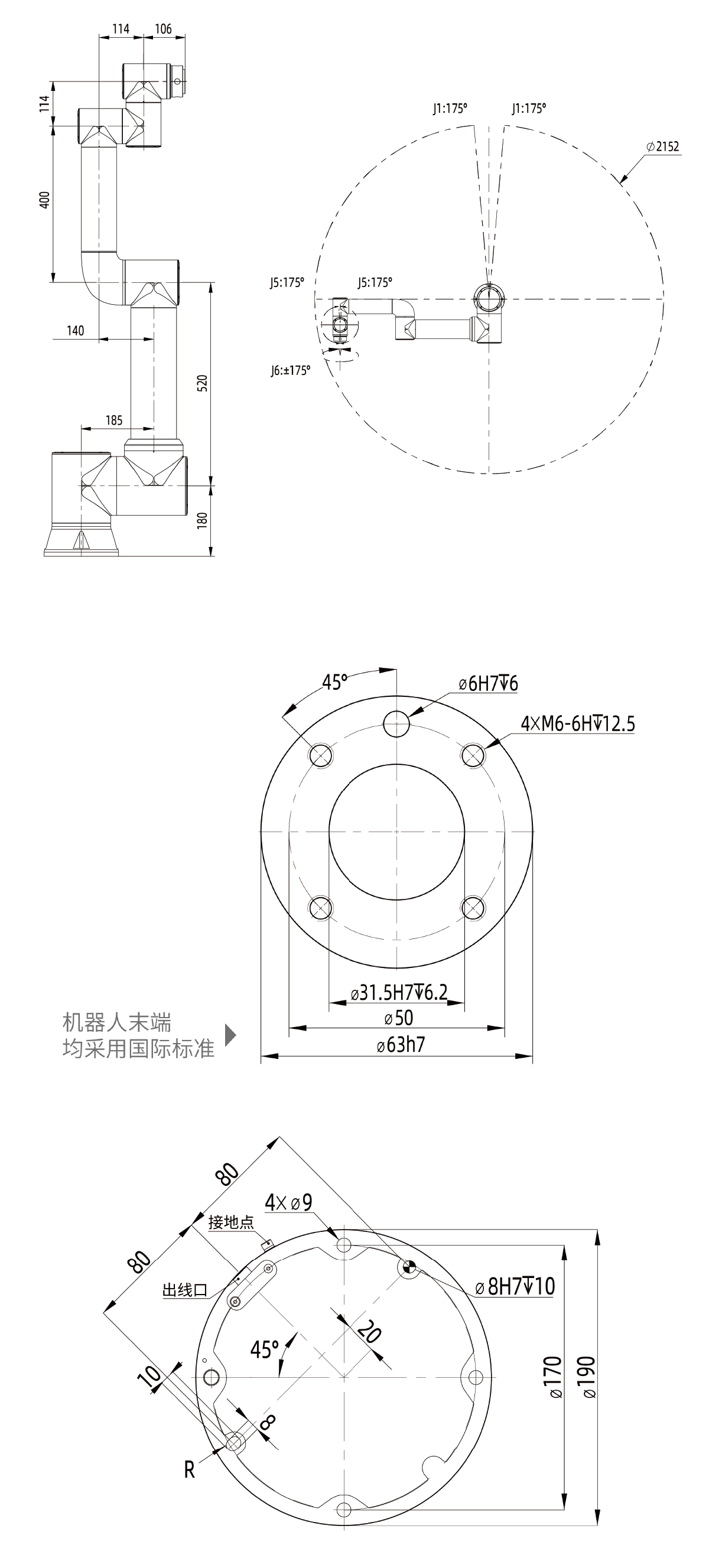
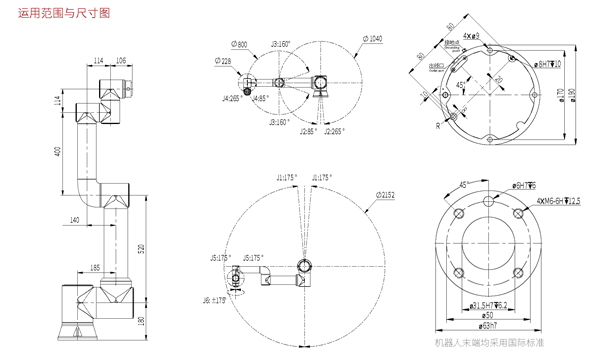
| *范围尺寸图 |
 |
规格参数
| 详情 |
| 重量 | ≈40kg |
| 有效负载 | 16kg |
| 工作半径 | 1034mm |
| 关节活动范围 软件限位极限/td> | 1轴:±175°; 2轴:+85°,-265°; 3轴:±160°; 4轴:+85°,-265°; 5轴:±175°; 6轴:±175° |
| 典型速度 | 1m/s |
| 重复定位精度 | ±0.03mm |
| 安装面积 | φ190mm |
| 安装方向 | 正装、垂直侧装、倒装 |
| 控制箱尺寸 | 245*180*44.5mm |
| 自由度 | 6 |
| 末端I/O端口 | 数字输入:2; 数字输出:2 ; 模拟输入:1 ; 模拟输出:1 |
| 控制箱I/O端口 | 数字输入:16; 数字输出:16 ; 模拟输入:2; 模拟输出:2 |
| I/O电源 | 24V/1.5A |
| 通讯 | I/O、TCP/IP、Modbus_TCP/RTU、Proflnet |
| 开发环境 | C#/C++/Python/java/ROS |
| 噪声 | <65dB |
| 防护等级 | IP54 |
| 协调操作 | 具有碰撞检测功能,允许自定义碰撞等级 |
| 供电 | 220V/50HZ |
| 使用环境 | ·远离振动,且振动强度不高于 0.5G ·远离腐蚀性气体、液体及爆炸性气体 ·避免尘土、烟雾及水 ·避免设备在电流的不稳定条件下工作 |
| 使用温度范围 | 0~45℃ |
| 使用湿度范围 | 20~80%RH(不结露) |
| 出线规格 | 线长3.7m(不能走拖链) |
备注:由于产品不断推新迭代,产品参数如有变更,恕不另行通知。
资料下载