实战数据沉淀 穷实智能知识底座
大模型深度赋能严控智能输出精度
场景智能适配精准匹配多元需求
多智能体协同高效统筹全域任务
在仿真中习得技能,在虚拟中积累经验
预设技能,开启低门槛自动化编排
软硬件深度融合,构建标准执行单元库
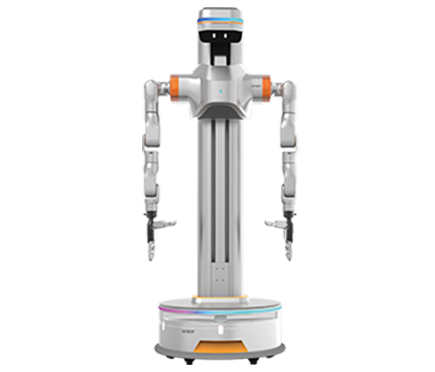
全仿生人体架构,动作协调自然,兼具灵活移 动与精细操作能力,可完成复杂人机协作与智 能服务类任务。
采用轮式移动机构,相比传统双足行走模式,移动效率提升30%-50%,且具有更强的运动稳定性。
搭配灵巧手或二指夹爪末端负载3KG。支持抓取、搬运等精细化操作,适应工业装配、物流分拣等多种工况。
实现360°灵活转向与厘米级精准定位,狭窄空间通过性优异。
搭载高自由度灵巧手及柔顺力控,可完成抓取、搬运、工具使用及易碎物操作。
高效移动
7自由度仿生双臂
灵巧底盘设计
多模态感知
融合激光雷达、RGB-D摄像头,构建实时环境地图。
全系列产品均可无缝接入 HITBOT OS 系统,轻松实现快速搭建、验证与完善,让你的自动化工作流更高效便捷。
完整开发手册、接口说明与配置指南,助你快速上手与深度开发。
直观操作演示与场景教学,一步步带你掌握系统使用与方案搭建。
快速查询使用疑问与故障排查,高效解决使用过程中的各类问题。