eHand-6
让机器拥有人类触感


eHand-16
让机器拥有人类触感

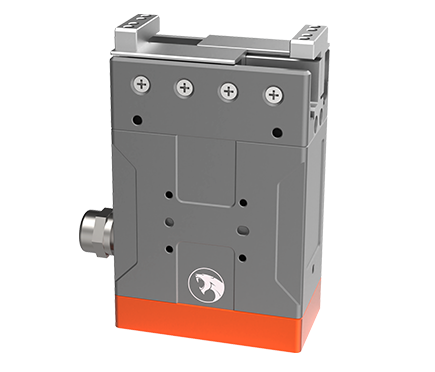
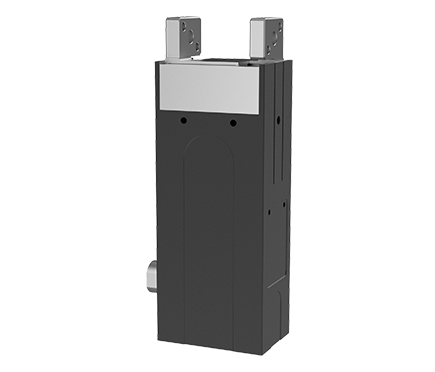
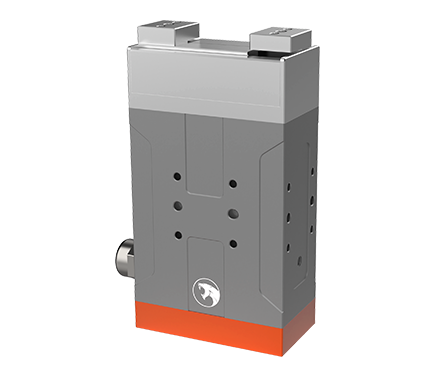
Z-EFG-8S
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。
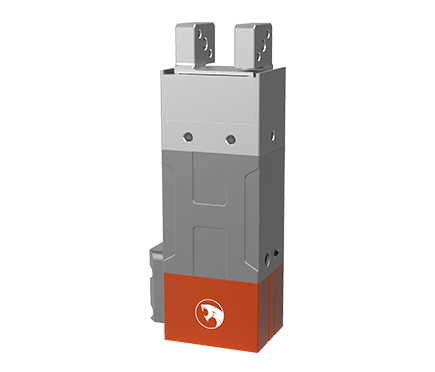
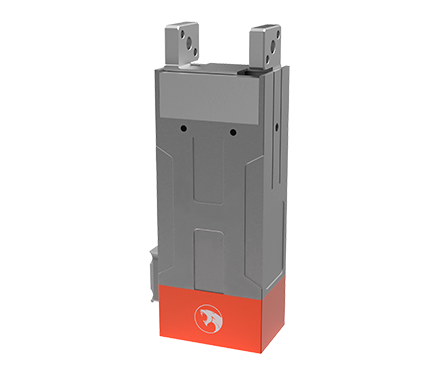
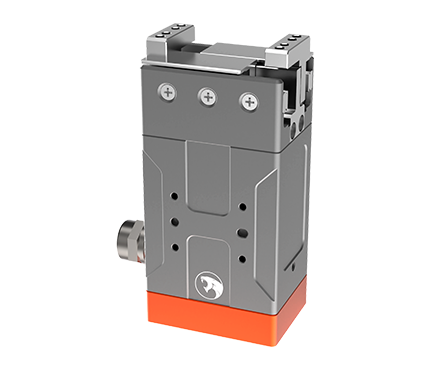
Z-EFG-12
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。
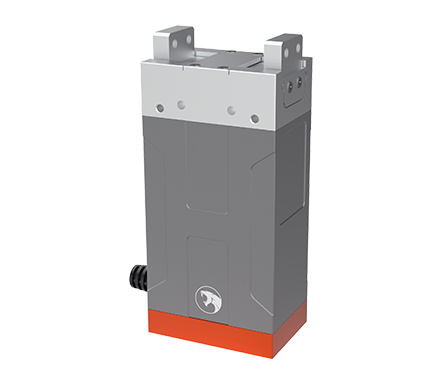
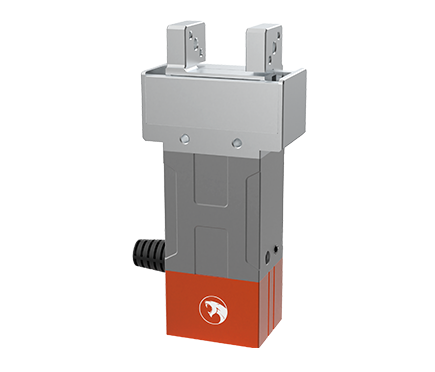
Z-EFG-20
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。
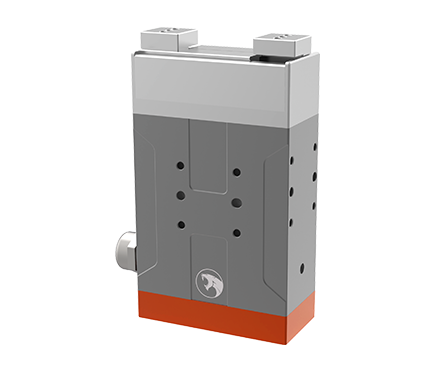
Z-EFG-20P
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。
Z-EFG-20F
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。

Z-EFG-20S
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。
Z-EFG-26
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。
Z-EFG-26P
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。
Z-EFG-30
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。
Z-EFG-50
负载能力强、定位精准,运动轨迹稳定可控,可长时间连续执行自动化作业,满足工业生产高效可靠的使用要求。