


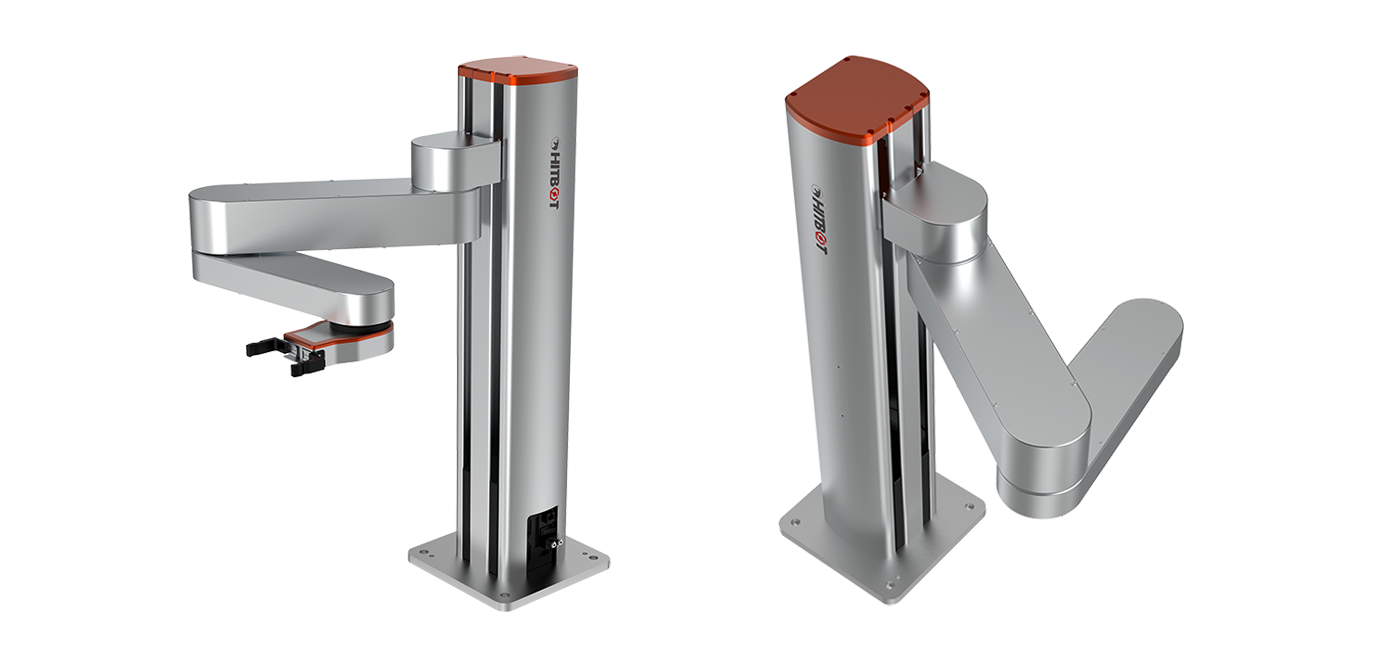

| 产品图片 |  |
 |
 |
 |
||
| 四轴协作机械臂 | Z-Arm XX32 | Z-Arm XX42 | Z-Arm XX60 | Z-Arm XX50 | ||
| 基本信息 | 1 轴 | 臂长 | 160mm | 220mm | 325mm | 275mm |
| 旋转角度 | ± 90° | |||||
| 2 轴 | 臂长 | 160mm | 200mm | 275mm | 225mm | |
| 旋转角度 | ± 143° | ± 164° | ± 164° | ± 164° | ||
| Z 轴 | 行程 | 180mm (高度可定制) | 240mm (高度可定制) | 410mm (高度可定制) | 410mm | |
| R 轴 | 旋转范围 | ± 1080° | ±1080° 无机械限位 /±170° 有机械限位 | ±1080° 无机械限位/ ±170° 有机械限位 | ±1080° 无机械限位 / ±170° 有机械限位 | |
| 线速度 | 1017mm/s (负载 0.5kg) | 1255.45mm/s (负载1.5kg); 1220mm/s (负载 2kg); | 1500mm/s (负载 3Kg) | 1400mm/s (负载4kg) | ||
| 重复定位精度 | ± 0.02mm | ± 0.03mm | ± 0.05mm | ± 0.05mm | ||
| 标准负载 | 0.5kg | 2kg | 3kg | 4kg | ||
| 最大负载 | 1kg | 3kg | 3.5kg | 5 kg | ||
| 自由度 | 4 | |||||
| 电源 | 220V/110V 50-60Hz 适配至24VDC 峰值功率320W | 220V/110V 50Hz-60Hz 适配至24VDC峰值功率500W | 220V/110V 50-60Hz 适配至DC48V 峰值功率 960W | 220V/110V 50-60Hz 适配至48VDC峰值功率 960W | ||
| 通讯 | Ethernet | |||||
| 硬急停 | / | / | 支持 | 支持 | ||
| Z轴可以定制高度 | 0.1米 ~ 0.5 米 | 0.1米 ~ 1米 | 0.1米 ~ 1米 | 0.1米 ~ 1米 | ||
| Z轴拖动示教 | / | / | / | / | ||
| 电器预留接口 | / | 标配: 插座面板直通下盖板2根4*23awg(无屏蔽层)线; 可选配: 插座面板直通法兰2根ø4 气管 | 标配: 插座面板直通下盖板2根4*23awg(无屏蔽层)线; 可选配: 插座面板直通法兰2根ø4 气管 | 标配:插座面板直通小臂下盖板2根 4*23awg (无屏蔽层)线; 可选配: 插座面板直通法兰2根φ4气管 | ||
| 适配 HITBOT 电动夹爪 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-30/Z-EFG-50, 第五轴,3D打印 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100, 第五轴,3D打印 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100, 第五轴,3D打印 | ||
| 第二臂体运动范围 | 标配: ±143° | 标配: ± 164°; 选配: 15deg-345deg | 标配: ± 164°; 选配: 15deg-345deg | / | ||
| 使用环境 | 环境温度: 0-55℃ 湿度: RH85 (不结霜) | |||||
| V/O 口 | 数字输入(隔离) | 9 + 3 | 9+3+小臂扩展 (8进8出;夹爪专用端口: 脉冲或485) | 9+3+小臂扩展 (8进8出;夹爪专用端口: 脉冲或485) | ≤14 | |
| 数字输出(隔离) | 9 + 3 | 9+3+小臂扩展 (8进8出;夹爪专用端口: 脉冲或485) | 9+3+小臂扩展 (8进8出;夹爪专用端口: 脉冲或485) | ≤22 | ||
| 模拟量输入(4-20mA) | / | / | / | ≤6 | ||
| 模拟量输出(4-20mA) | / | / | / | 0 | ||
| 整机高度 | 500mm | 596mm | 830mm | 400mm | ||
| 主机重量 | 180mm行程裸机重量约11kg | 240mm行程裸机重量约19kg | 410mm行程裸机重量约28kg | 410mm行程裸机重量约28kg | ||
| 底座安装尺寸 | 底座外形尺寸 | 200mm*200mm*10mm | 200mm*200mm*10mm | 250mm*250mm*15mm | 250mm*250mm*15mm | |
| 底座固定孔位间距 | 160mm*160mm 配四个 M5*12 螺丝 | 160mm*160mm 配四个 M8*20 螺丝 | 200mm*200 配四个M8*20 螺丝 | 200mm*200 配四个M8*20螺丝 | ||
| 碰撞检测 | √ | √ | / | / | ||
| 拖动示教 | √ | √ | / | / | ||
| 底盘兼容性 | 与 Z-Arm 1632 底盘完全兼容 | / | 与Z-Arm ZZ60底盘完全兼容 | / | ||
| 法兰盘兼容性 | 与 Z-Arm 1632 法兰兼容 | 与 Z-Arm 2140 法兰盘兼容 | 与Z-Arm XX42 法兰盘兼容 | 与Z-Arm XX42法兰兼容 | ||
| 调试/在线升级(USB口) | √ | √ | √ | √ | ||
| 备注:由于产品不断推新迭代,产品参数如有变更,恕不另行通知 | ||||||
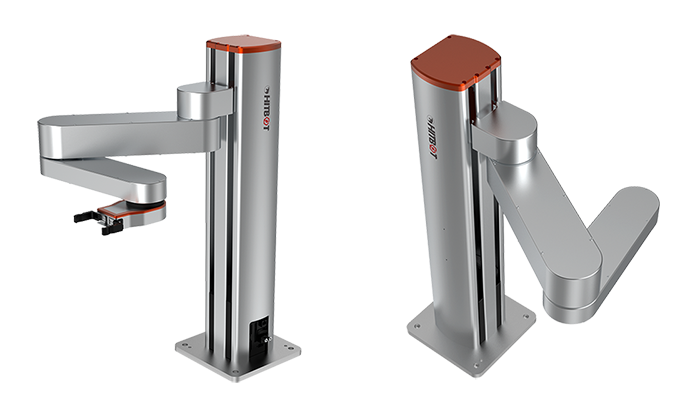
| 产品图片 | |
|
||
| 四轴协作机械臂 | Z-Arm XX32 | Z-Arm XX42 | ||
| 基本信息 | 1 轴 | 臂长 | 160mm | 220mm |
| 旋转角度 | ± 90° | ± 90° | ||
| 2 轴 | 臂长 | 160mm | 200mm | |
| 旋转角度 | ± 143° | ± 164° | ||
| Z 轴 | 行程 | 180mm (高度可定制) | 240mm (高度可定制) | |
| R 轴 | 旋转范围 | ± 1080° | ± 1080° | |
| 线速度 | 1017mm/s (负载 0.5kg) | 1220mm/s (负载2kg); 1023.79mm/s (负载 2kg); | ||
| 重复定位精度 | ± 0.02mm | ± 0.03mm | ||
| 标准负载 | 0.5kg | 2kg | ||
| 最大负载 | 1kg | 3kg | ||
| 自由度 | 4 | 4 | ||
| 电源 | 220V/110V 50-60Hz 适配至24VDC 峰值功率320W | 220V/110V 50Hz-60Hz 适配至24VDC峰值功率500W | ||
| 通讯 | Ethernet | Ethernet | ||
| 硬急停 | / | / | ||
| Z轴可以定制高度 | 0.1米 ~ 0.5 米 | 0.1米 ~ 1米 | ||
| Z轴拖动示教 | / | / | ||
| 电器预留接口 | / | 标配: 插座面板直通下盖板2根4*23awg(无屏蔽层)线; 可选配: 插座面板直通法兰2根ø4 气管 | ||
| 适配 HITBOT 电动夹爪 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-30/Z-EFG-50, 第五轴, 3D打印 | ||
| 第二臂体运动范围 | 标配: ±143° | 标配: ± 164°; 选配: 15deg-345deg | ||
| 使用环境 | 环境温度:0~45℃, 相对温度: 20-80RH(不结霜) | 环境温度:0~45℃, 相对温度: 20-80RH(不结霜) | ||
| V/O 口 | 数字输入(隔离) | 9 + 3 | 9+3+小臂扩展(8进8出;夹爪专用端口:脉冲或485) | |
| 数字输出(隔离) | 9 + 3 | 9+3+小臂扩展(8进8出;夹爪专用端口:脉冲或485) | ||
| 模拟量输入(4-20mA) | / | / | ||
| 模拟量输出(4-20mA) | / | / | ||
| 整机高度 | 500mm | 596mm | ||
| 主机重量 | 180mm行程裸机重量约11kg | 240mm行程裸机重量约19kg | ||
| 底座安装尺寸 | 底座外形尺寸 | 200*200*10mm | 200*200*10mm | |
| 底座固定孔位间距 | 160*160mm 配四个 M5*12 螺丝 | 160*160mm 配四个 M8*20 螺丝 | ||
| 碰撞检测 | √ | √ | ||
| 拖动示教 | √ | √ | ||
| 底盘兼容性 | 与 Z-Arm 1632 底盘完全兼容 | / | ||
| 法兰盘兼容性 | 与 Z-Arm 1632 法兰兼容 | 与 Z-Arm 2140 法兰盘兼容 | ||
| 调试/在线升级(USB口) | √ | √ | ||
| 备注:由于产品不断推新迭代,产品参数如有变更,恕不另行通知 | ||||
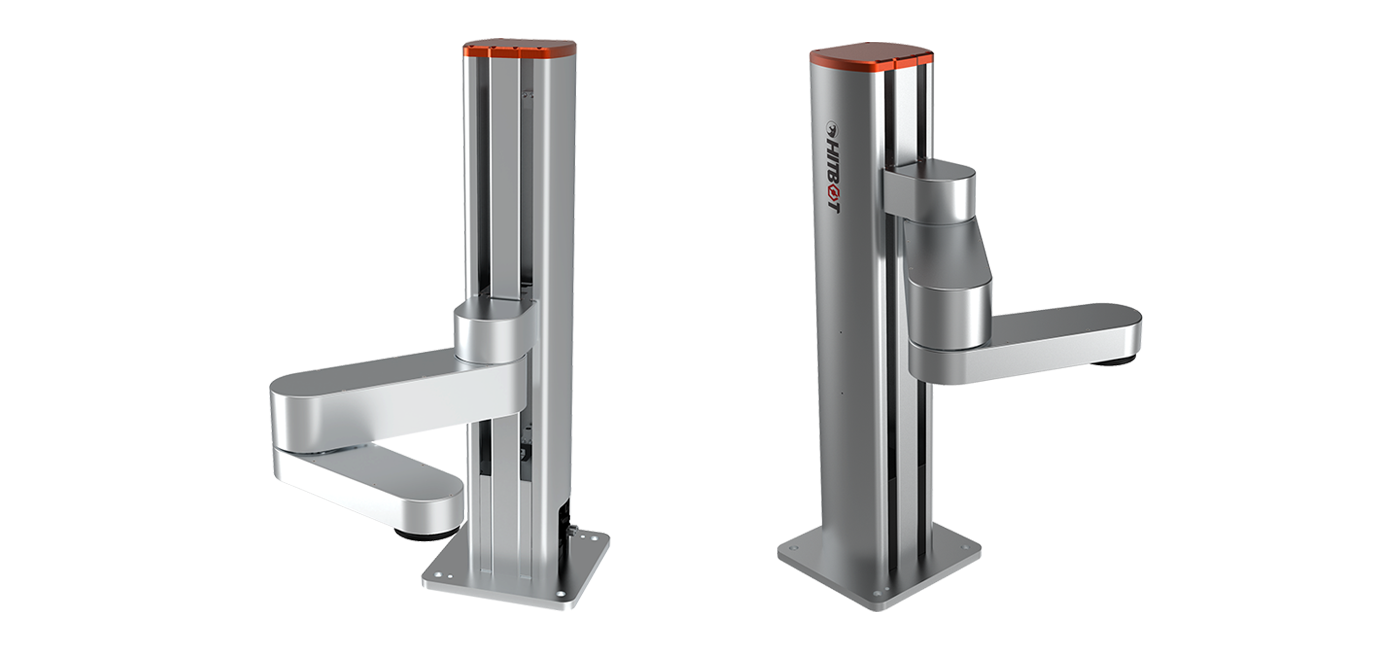
| 产品图片 | |
|
||
| 四轴协作机械臂 | Z-Arm XX60 | Z-Arm XX50 | ||
| 基本信息 | 1 轴 | 臂长 | 325mm | 275mm |
| 旋转角度 | ± 90° | ± 90° | ||
| 2 轴 | 臂长 | 275mm | 225mm | |
| 旋转角度 | ± 164° | ± 164° | ||
| Z 轴 | 行程 | 410mm (高度可定制) | 410mm(高度可定制) | |
| R 轴 | 旋转范围 | ±1080° 无机械限位/ ±170° 有机械限位 | ±1080° 无机械限位 / ±170° 有机械限位 | |
| 线速度 | 1500mm/s (负载 3Kg) | 1400mm/s (负载4kg) | ||
| 重复定位精度 | ± 0.05mm | ± 0.05mm | ||
| 标准负载 | 3kg | 4kg | ||
| 最大负载 | 3.5kg | 5kg | ||
| 自由度 | 4 | 4 | ||
| 电源 | 220V/110V 50-60Hz 适配至DC48V 峰值功率 960W | 220V/110V 50-60Hz 适配到DC48V 峰值功率960W | ||
| 通讯 | Ethernet | Ethernet | ||
| 硬急停 | 支持 | 支持 | ||
| Z轴可以定制高度 | 0.1米 ~ 1米 | 0.1米 ~ 1米 | ||
| Z轴拖动示教 | / | / | ||
| 电器预留接口 | 标配: 插座面板直通下盖板2根4*23awg(无屏蔽层)线; 可选配: 插座面板直通法兰2根ø4 气管 | 标配: 插座面板直通下盖板2根4*23awg(无屏蔽层)线; 可选配: 插座面板直通法兰2根ø4 气管 | ||
| 适配 HITBOT 电动夹爪 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100, 第五轴,3D打印 | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100, 第五轴,3D打印 | ||
| 第二臂体运动范围 | 标配: ± 164°; 选配: 15deg-345deg | 标配: ± 164°; 选配: 15deg-345deg | ||
| 使用环境 | 环境温度:0-45℃,相对湿度:20-80RH(不结霜) | 环境温度:0-45℃,相对湿度:20-80RH(不结霜) | ||
| V/O 口 | 数字输入(隔离) | 9+3+小臂扩展(8进8出;夹爪专用端口:脉冲或485) | 9+3+小臂扩展(8进8出;夹爪专用端口:脉冲或485) | |
| 数字输出(隔离) | 9+3+小臂扩展(8进8出;夹爪专用端口:脉冲或485) | 9+3+小臂扩展(8进8出;夹爪专用端口:脉冲或485) | ||
| 模拟量输入(4-20mA) | / | / | ||
| 模拟量输出(4-20mA) | / | / | ||
| 整机高度 | 830mm | 830mm | ||
| 主机重量 | 410mm行程裸机重量28.5KG | 410mm行程裸机重量28KG | ||
| 底座安装尺寸 | 底座外形尺寸 | 250*250*15mm | 250*250*15mm | |
| 底座固定孔位间距 | 200mm*200 配四个M8*20 螺丝 | 200mm*200 配四个M8*20 螺丝 | ||
| 碰撞检测 | / | / | ||
| 拖动示教 | / | / | ||
| 底盘兼容性 | 与Z-Arm XX60底盘完全兼容 | / | ||
| 法兰盘兼容性 | 与Z-Arm XX42 法兰盘兼容 | 与Z-Arm XX42 法兰盘兼容 | ||
| 调试/在线升级(USB口) | √ | √ | ||
| 备注:由于产品不断推新迭代,产品参数如有变更,恕不另行通知 | ||||
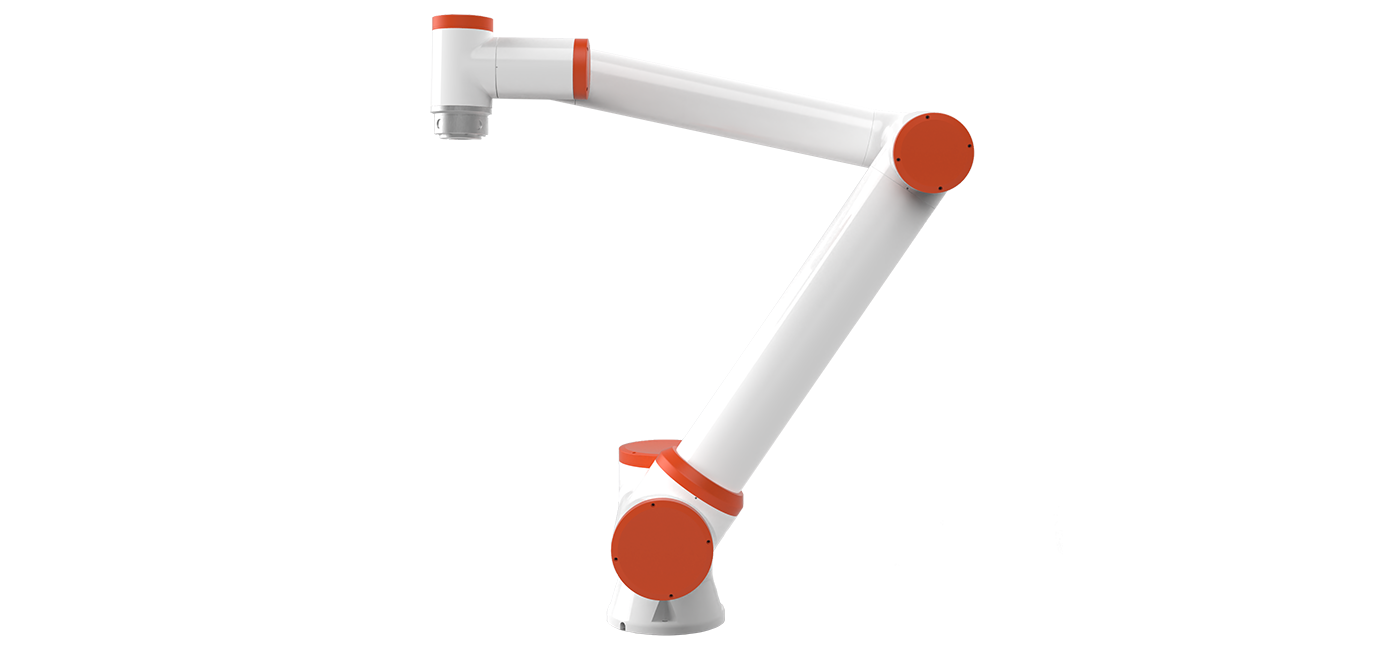
| 产品图片 | 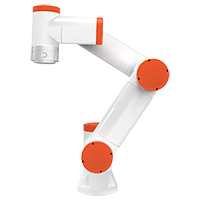 |
 |
 |
| 六轴协作机械臂 | Z-Arm S622 | Z-Arm S922 | Z-Arm S1400 |
| 重量 | 15KG | ≈22KG | ≈40KG |
| 有效负载 | 3KG | 5KG | 10KG |
| 工作范围 | 622mm | 922mm | 1400mm |
| 安装面积 | φ130mm | φ150mm | φ190mm |
| 关节活动范围 软件限位极限 | 1 轴: ±175°; 2 轴: +85°, -265°; 3 轴: ±150°; 4 轴: + 85°, -265°; 5轴: ±175°; 6轴: ±175°. | 1 轴: ±175°; 2 轴: +85°, -265°; 3 轴: ±160°; 4 轴: +85°, -265°; 5轴: ±175°; 6轴: ±175°. | |
| 重复定位精度 | ±0.02mm | ||
| 关节最大速度 | 180°/s | ||
| 控制箱尺寸 | 342*260*90mm (不含凸起物) | ||
| 自由度 | 6 | ||
| 控制箱 I/O 端口 | 数字输入: 16; 数字输出: 16; 模拟输入: 2; 模拟输出: 2. | ||
| 末端 I/O 端口 | 模拟输入: 1; 模拟输出:1 数字输入:2; 数字输出: 2 | ||
| 防护等级 | IP54 | ||
| 噪声 | <65DB | ||
| 通讯 | Ethernet, TCP/IP, 485 通信 | ||
| I/O 电源 | 24 / 1.5A | ||
| 协调操作 | 具有碰撞检测功能,允许自定义碰撞等级 | ||
| 供电 | 220V / 50Hz | ||
| 使用环境 | ①远离腐蚀性气体、液体及爆炸性气体 ②避免设备在电流的不稳定条件下工作 ③远离振动,且振动强度不高于0.5G ④避免尘土、烟雾及水 | ||
| 温度 | 0~45℃ | ||
| 湿度 | 20-80RH (不结露) | ||